
Veremos de una manera simple, cómo tener presentes las instrucciones que nos servirán a lo largo de todo este programa.
En primera instancia, recordemos las conexiones que tenemos en nuestro brick:
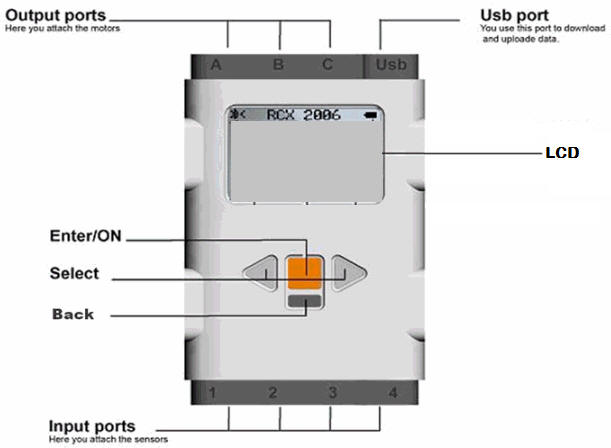
Es importante la explicación anterior (en inglés) ya que las instrucciones se escriben en inglés, pero conociendo algunas palabras básicas, podremos entenderlo todo más fácilmente.
Los puertos de los sensores son de ENTRADA (IN), los que deberemos dejar ESTABECIDOS (SET) de acuerdo a lo que conectemos en cada uno.
Por otro lado, los motores se conectan a los puertos de SALIDA (OUT) a los cuales podremos ENCENDER (ON) o APAGAR (OFF) tanto para ADELANTE (FWD) o en REVERSA (REV). También podremos hacer ROTAR EL MOTOR una determinada cantidad de grados si así se necesita.
Existen también instrucciones que nos permiten manejar tiempos, momentos, la pantalla LCD, etc. pero lo veremos de manera práctica más adelante.
PRIMER PROGRAMA
Conociento todo lo anteriormente estipulado, escribamos entonces, nuestro primer programa.
Supongamos el siguiente ejemplo en TurlteBots:
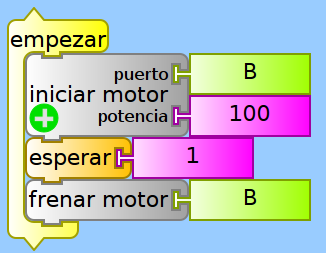
Realizando una descomposición del programa, podemos traducirlo de la siguiente manera:
- Comienza el programa
- Encendemos el motor que está en el puerto B con una potencia de 100
- Esperamos 1 segundo
- Apagamos el motor que está en el puerto B.
Escribamos lo mismo pero ahora en nuestro editor:
task main() {
OnFwd(OUT_B, 100);
Wait(1000);
Off(OUT_B);
}
¿Qué es cada sector de nuestro código?
task main() { → nombre del programa «principal»
OnFwd → ENCENDER hacia ADELANTE
OUT_B → El motor que está en el puerto de SALIDA B.
100 → con una potencia de 100.
Wait(1000) → Esperar 1000 milisegundos = 1 segundo
Off → Apagar
OUT_B → El motor que está en el puerto de SALIDA B.
} → Cerramos el programa principal
Si vemos las frases que están a continuación de cada flecha, veremos que coincide perfectamente con el mismo programa que teníamos anteriormente creado en TurtleBots.
¿Cómo ejecutamos el programa?
Sólamente debemos hacer clic en cualquiera de las opciones que están al lado de la lupa arriba a la derecha de acuerdo al siguiente orden:
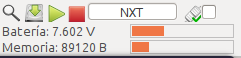
- Guardar, compilar y bajar al robot → envía el programa al brick pero no inicia (con el mismo nombre que el archivo).
- Guardar, compilar, bajar y comenzar el programa en el robot → envía el programa al brick e inicia.
- Detener todos los programas.
¿Hay otra manera de probar si mi programa funciona?
¡SI!… este programa trae el nxcSimulador que nos permitirá testear nuestro programa en un robot virtual que podemos modificar a nuestro gusto (pero con varias limitaciones). Para esto utilizaremos los botones que están en la misma barra de herramientas que la lupa (debajo del menú Robot):
![]()