
El simulador podemos iniciarlo yendo al menú nxcSimulador y seleccionando «Abrir nxcSimulador → F8«.
Como vimos en los ejemplos anteriores, si ya tenemos un programa realizado, haciendo clic en el botón «play verde»; con esto ya abrimos el simulador y comienza a correr el mismo (opción recomendada):
![]()
Sin embargo, podemos controlar otras acciones utilizando las opciones de esta ventana.
La interfaz, es bastante intuitiva, pero veremos cómo configurar nuestro robot para que el programa que realizamos se pueda alinear al modelo virtual.
Para ello, iremos al menú Robot → Editar Robot y allí se abrirá una primer ventana con estas opciones:
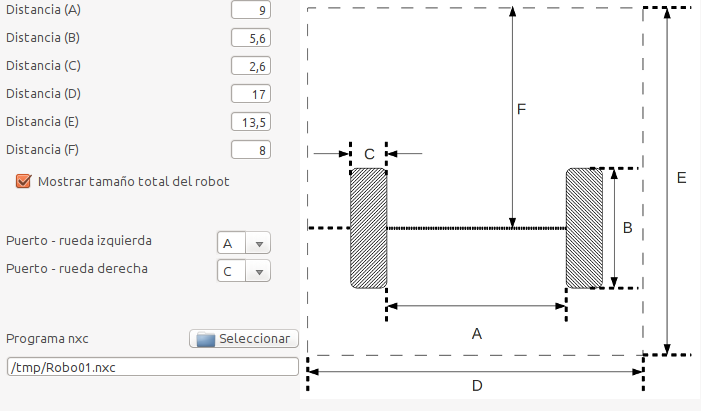
Aquí configuraremos los motores (sólo 2). Como vemos, la interfaz es bastante clara con respecto a las guías que podemos modificar modificar (si es necesario): distancias, puertos, nombre del programa.nxc.
La única «observación» que debemos tener en cuenta, es que la limitación del simulador es que siempre supone que trabajamos con una especie de «carrito» de este tipo:
(Imagen sólamente ilustrativa)
Con respecto a los sensores, su configuración va a estar basada en ejes de coordenadas x,y de dónde están colocados los mismos. Se encuentran en la seguda pestaña de la edición del robot y se ve de la siguiente manera:
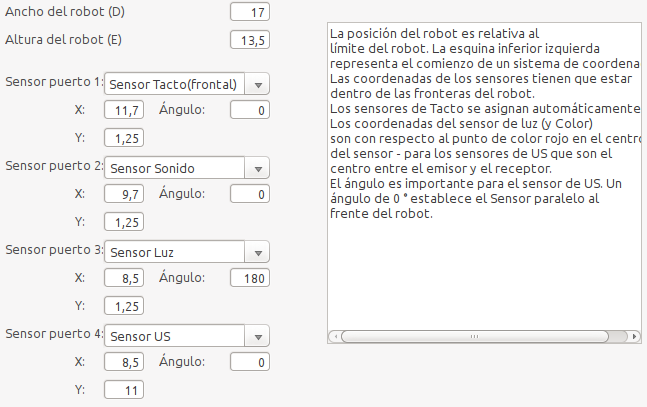
Aquí también podremos modificar todos aquellos puertos que deseemos, así como la posición de los sensores.
Para finalizar y sólo a modo decorativo, la tercer pestaña nos permite modificar el formato del brick, las ruedas y el color de la línea punteada (rastro que va dejando nuestro robot mientras se mueve):

Una vez configurado nuestro robot, podemos guardarlo en la ventana principal del Simulador, bajo el menú Robot → Guardar robot y recuperarlo con la opción Seleccionar robot.